drawing robot
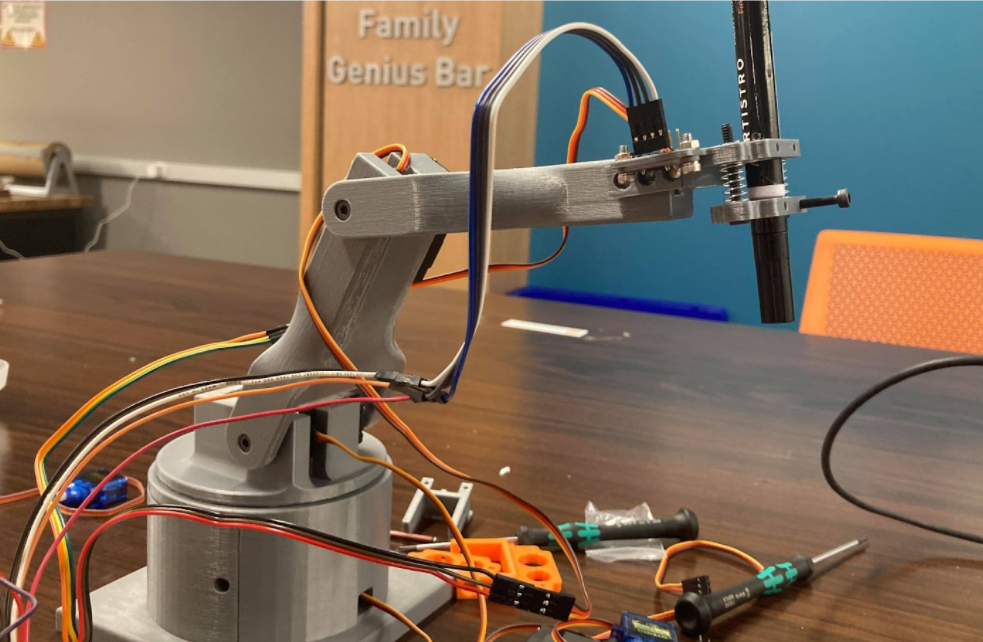
This project was the second group assignment in a graduate robotics class. The goal of the project was to create a robot that could write our initials. My group wanted to challenge ourselves so our goal was to write in three dimensions rather than two. We broke the project up into three smaller parts: extracting x,y data from an SVG, inverse kinematics of the 4dof robot arm, and projecting the SVG points onto a 3D surface. My main contribution was the projection of the SVG points onto a 3D surface. The main challenge here was creating a 3D mesh of an object. To accomplish this, I used a LIDAR that sampled points to create a 3D mesh of a surface using a 3rd degree polynomial where the coefficients were determined by a linear regression. For our inverse kinematics we solved the system analytically using the Denavit-Hartenberg convention. Unfortunately, our inverse kinematics calculations were not correct so our arm exhibited strange behavior and we did not have enough time to fix the issue.